- To Share:

- |


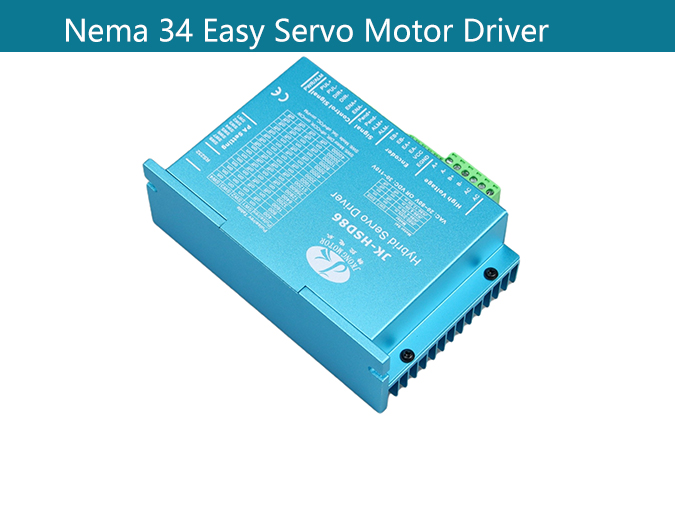

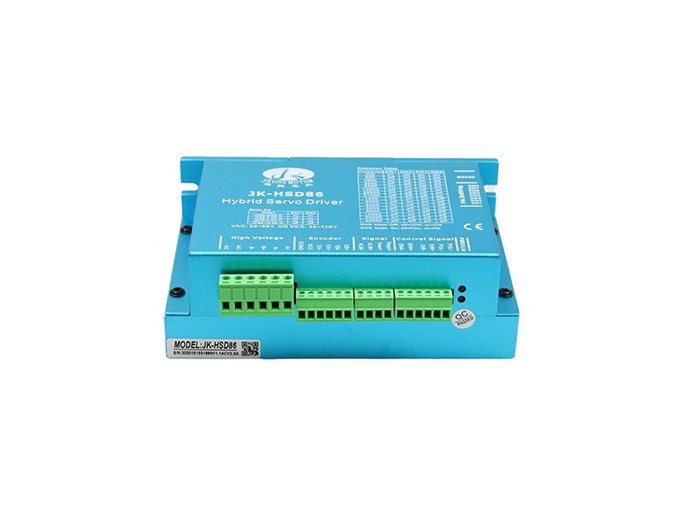


JK-HSD86 Nema 34 Easy Servo Stepper Motor Driver
Product Description:
Main features:
Product Type: Nema 34 Easy Servo Motor Driver
Feature summary:High start speed; High hording torque under high speed; High performance, low price
Place of Origin:china
Minimum order quantity:10pcs
Support Motor: Nema 34 Closed Loop Stepper Motor
Packing:The sample is packed in carton,the batch with plastic pallet
Delivery time:Standard product: 7-10days
Customized product: 25-30days
Transaction mode:EXW, FOB, FCA, CIF, FAS, CFR, CPT, CIP, DAF, DEQ, DDU, DDP...
Product Overview:
JK-HSD86 is one of the models in Jkongmotor series easy servo drives which can take 20-80 VDC operating voltage and output 0.1 -10A continuous load-based current. It is capable of driving NEMA 17, 23, 24 and 34 easy servo motors (stepper motors with encoders) with the position loop closed in real time.
Based on latest DSP technology and adopting Novo's advanced control algorithm, JK-HSD86 easy servo drive applies servo control on easy servo motors. When adopted with an easy servo motor, it combines features of both open loop steppers & brushless servo systems, and offers many unique advances features for excellent motion control system performance.
When an JK-HSD86 easy servo drive is implemented with a novo SC series easy servo motor, there is No Configuration Needed for almost all applications. The output resolution from JK-HSD86 with the output resolution defaulted to output resolution of 2,000 pulses per resolution (equal to 10 microstep in 2-phase stepper systems). Via DIP switches, a user can also easily change the output resolution to one of 15 output resolutions 400 to 51,200 (equal to 2-256 microstep in 2-phase stepper systems). With novo configuration software, ProTuner, an advanced user can also set custom settings of resolution, current & position loop parameters, idle current percentage, etc.
Features:
● Step and direction control
● Closed position loop for no loss of movement synchronization
● Operating voltage: 20-80 VDC
● Load based output current of 0.1 - 10 A
● High torque at starting and low speed
● No torque reservation
● High stiffness at standstill
● Significantly reduced motor heating
● Smooth motor movement and extra low motor noise
● Quick response, no delay and zero settling time
● No loss of steps; no hunting; no overshooting
● Plug-and-play and no tuning
Application:
With many unique advanced features, JK-HSD86 easy servo systems are ideal for many industries to upgrade stepper performance or replace brushless servo systems in many applications.
Jkongmotor OEM clients have successfully implemented JK-HSD86 driven easy servo systems in applications such as small-to-large size CNC routers, CNC mills, plasmas, large-scale laser cutters / engravers, labeling equipments, robotics, gemstone processing machines, pick & place machines, X-Y tables.
Electrical Specifications:
Parameter | Min | Typical | Max | Unit |
Input Voltage (JK-HSD86) | 20 | 36 48 | 50 | VDC |
Input Voltage (JK-HSD86C) | 24 | 36 48 | 80 | VDC |
Input Voltage (SC8680C) | 24VAC | 60AC | 80VAC 100VDC | VVDC |
Output Current | 0.1 | - | 10(Peak) | A |
Pulse Input Frequency | 0 | - | 200 | kHz |
Logic Signal Current | 7 | 10 | 16 | mA |
Isolation Resistance | 500 | - | - | MΩ |
Operating Environment:
Cooling | Natural Cooling or Forced cooling | |
Operating Environment | Environment | Avoid dust, oil fog and corrosive gases |
Storage Temperature | -20℃ - 65℃ (-4℉ - 149℉) | |
Ambient Temperature | 0℃ - 50℃ (32℉ - 122℉) | |
Humidity | 40%RH - 90%RH | |
Operating Temperature | 70℃ (158℉) Max | |
(Heat Sink) | ||
Weight | 580 g (20.5 oz) | |
Microstep Resolution (SW1-SW4):
Steps/Revolution | SW1 | SW2 | SW3 | SW4 |
Software Configured (Default 400) | on | on | on | on |
800 | off | on | on | on |
1600 | on | off | on | on |
3200 | off | off | on | on |
6400 | on | on | off | on |
12800 | off | on | off | on |
25600 | on | off | off | on |
51200 | off | off | off | on |
1000 | on | on | on | off |
2000 | off | on | on | off |
4000 | on | off | on | off |
5000 | off | off | on | off |
8000 | on | on | off | off |
10000 | off | on | off | off |
20000 | on | off | off | off |
40000 | off | off | off | off |
Motor Direction (SW5) and Pulse Mode (SW6):
Function | On | Off | ||
SW5 | Default DirectionDirection | Note | CW (clock-wise) | CCW (counter-clock-wise) |
SW6 | Pulse Mode | CW/CCW | PUL/DIR | |
Note: The actual direction is related to the DIR level. You can toggle SW5 to change it once.
Current Control:
The motor current will be adjusted automatically regarding to the load or the stator-rotor relationship. However, the user can also configure the current in the tuning software. The configurable parameters include close-loop current, holding current, encoder resolution, micro step and etc. There are also PID parameters for the current loop, and they have been tuned for jkongmotor s matching motors so the user does not need to tune them.
Common problems:
Phenomenon | Possible problems | Solutions |
Motor not running | Power light is off | Check the power supply circuit, normal power supply |
Motor shaft has torque | The pulse signal is weak and increase the current to 7-16mA | |
Too small subdivision | Choose right subdivision | |
If the current setting too small | Choose right current | |
Driver is protected | Re-power | |
The enable signal is low | This signal is pulled high or not connect | |
No responsive to control signal | No powered | |
Motor direction error | Wrong wiring of motor | Exchange any two lines of the same phase of the motor (eg A +, A-exchange connection positions) |
Motor circut is open | Check and connection right | |
Alarm indicator light | Wrong wiring of motor | Check the wiring |
Voltage is too high or too low | Check the power supply | |
Motor or driverdamaged | Change the motor or driver | |
Wrong position | The signal is disturbed | Eliminate interference |
No connect grounding | Grounding right | |
Motor circut is open | Check and connection right | |
Wrong subdivision | Set right subdivision | |
Small current | Increase the current | |
The motor can’t run when acceleration | Acceleration time is too short | Acceleration more time |
Too samll motor torque | Select a large torque motor | |
Low voltage or current is too small | Increase the voltage or current |

Nema 34 Closed Loop Stepper Motor
FAQS:
1. How can get it started as soon as possible when you first use the drive?
After you correctly connect the power cord, the motor line, the Hall line, the external potentiometer slowly accelerates. After the motor is turned correctly, you can test the enable, direction and other functions. If you are unfamiliar with the product, the initial use should be done after the test. And then it can be installed to the actual use.
2. What will come about if power supply is reverse?
It will immediately burn the drive.
3. What is the maximum of the upper control signal voltage ?
The maximum voltage of the speed regulation signal is 5V. Exceeding this voltage will cause the drive to burn.
4. After the driver has been working for a long time, the shell is hot. Is it normal?
Yes, it is. At room temperature, after long working hours, it is up to 90 degrees. And it will not affect the performance.
5. The power indicator is light, but the motor does not turn and shift, what is the reason?
There may be a mistake in the phase line and the Hall line. Please re-energize the wiring according to the motor manual.
6. Can my motor speed transferred to 6000 with this drive?
The maximum speed of the brushless motor is determined by the parameters of the motor itself. The drive can control the motor speed from 0 to the highest speed.
7. I already have a motor and how to install this drive after wiring?
You must first determine the motor phase and the definition of the Hall line, and then you can connect it with wires. If you are not sure, you need to ask the motor manufacturers. Incorrect wiring can cause damage to the drive.
8. Can I add some features on this drive or do new product development?
Yes, please contact us.