- To Share:

- |


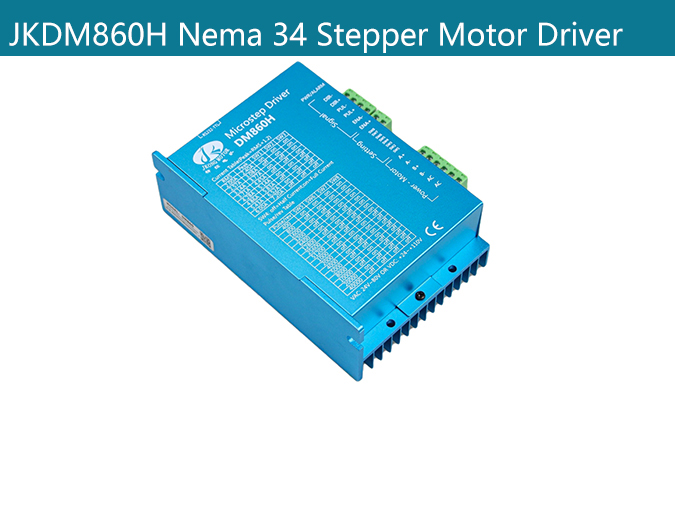



JKDM860H Stepper Motor Driver
Product Description:
Main features:
Product Type: Nema 34 Stepper Motor Driver
Feature summary:Low heat generation, low motor vibration and stable operation, Smooth operation and low noise
Place of Origin:china
Minimum order quantity:10pcs
Support Motor: Nema 34 Stepper Motor
Packing:The sample is packed in carton,the batch with plastic pallet
Delivery time:Standard product: 7-10days
Customized product: 25-30days
Transaction mode:EXW, FOB, FCA, CIF, FAS, CFR, CPT, CIP, DAF, DEQ, DDU, DDP...
Mechanical Size:

Product Overview:
1、The latest 32-bit digital processing technology
2、advanced control algorithm for variable current and variable frequency conversion
3、Low heat generation, low motor vibration and stable operation
4、Built-in micro-segmentation
5、Smooth operation and low noise
6、Integrated parameter power-on auto-tuning functio
7、Subdivision setting (within 400~51200) with overcurrent, overvoltage, undervoltage protection
Product Parameters:
Features | |
Input voltage | 24~80VAC/24~110VDC |
Output current | 2.4~7.2A (PEAK) |
Pulse frequency | 0~100KHz |
MicroSteps | 16 MicroSteps |
Using environment | -5~50℃,avoiddust,high teperatureand corrosive gas |
Storage environment | -20~+80℃,avoid direct sunlight |
The drive power supply AC and DC power supply is universal, the AC power supply range is 24~80VAC, the DC power supply range is 24~110VDC, and the DC power supply has positive and negative power supply anti-reverse connection functions.
Motor and power | ||
Symbol | Name | Remark |
A+ | Phase A+ | / |
A- | Phase A- | / |
B+ | Phase B+ | / |
B- | Phase B- | / |
AC | AC power input | / |
AC | AC power input | / |
Control Signal | ||
Symbol | Name | Remark |
PUL+ | Pulse signal + | / |
PUL- | Pulse signal - | / |
DIR+ | Direction signal+ | / |
DIR- | Direction signal- | / |
ENA+ | Enable signal + | Only connected when used |
ENA- | Enable signal - | Only connected when used |
Strengthen the heat dissipation method |
1) The reliable operating temperature of the driver is usually within 66 °C, and the motor operating temperature is within 85 °C; |
2) It is recommended to use the automatic semi-flow mode when using the motor. When the motor stops, the current is automatically reduced by half to reduce the heat of the motor and the drive; |
3)Install the drive with vertical side mounting, so that the heat dissipating teeth form a strong air convection; if necessary, install a fan near the drive to force heat dissipation to ensure that the drive works within a reliable operating temperature range. |
DIP switch setting | ||||||||
SW1 | ON | OFF | ON | OFF | ON | OFF | ON | OFF |
SW2 | ON | ON | OFF | OFF | ON | ON | OFF | OFF |
SW3 | ON | ON | ON | ON | OFF | OFF | OFF | OFF |
PEAK(A) | 2.40A | 3.08A | 3.77A | 4.45A | 5.14A | 5.83A | 6.52A | 7.20A |
RMS(A) | 2.00A | 2.57A | 3.14A | 3.71A | 4.28A | 4.86A | 5.43A | 6.00A |
SW4: The quiescent current can be set by the SW4 dial switch.OFF means that the quiescent current is set to half of the dynamic current. ON means that the quiescent current is the same as the dynamic current. | ||||||||
Microsteps setting | ||||||||||
Pulse | 400 | 800 | 1600 | 3200 | 6400 | 12800 | 25600 | 51200 | 1000 | 2000 |
SW5 | ON | OFF | ON | OFF | ON | OFF | ON | OFF | ON | OFF |
SW6 | ON | ON | OFF | OFF | ON | ON | OFF | OFF | ON | ON |
SW7 | ON | ON | ON | ON | OFF | OFF | OFF | OFF | ON | ON |
SW8 | ON | ON | ON | ON | ON | ON | ON | ON | OFF | OFF |
Pulse | 4000 | 5000 | 8000 | 10000 | 20000 | 40000 | 4000 | 5000 | 8000 | 10000 |
SW5 | ON | OFF | ON | OFF | ON | OFF | ON | OFF | ON | OFF |
SW6 | OFF | OFF | ON | ON | OFF | OFF | OFF | OFF | ON | ON |
SW7 | ON | ON | OFF | OFF | OFF | OFF | ON | ON | OFF | OFF |
SW8 | OFF | OFF | OFF | OFF | OFF | OFF | OFF | OFF | OFF | OFF |
The characteristic of the output torque |
1) The larger the actual current of the motor, the greater the output torque, but the more copper loss (P=I²R) of the motor, the more heat the motor generates; |
2) The higher the supply voltage of the driver, the higher the high-speed torque of the motor; |
3) It can be seen from the moment frequency characteristic diagram of the stepping motor that the high speed is smaller than the medium and low speed torque. |
Wiring requirements |
1) In order to prevent the driver from being disturbed, it is recommended to use the shieldedcable for the control signal, and the shield layer is shorted to the ground wire. Unless otherwise specified, the shielded cable of the control signal cable is grounded at one end: theupper end of the shielded wire is grounded, and the shielded wire The drive is suspended at one end. Only the grounding at the same point is allowed in the same machine. If it is not a real grounding wire, the interference may be serious. At this time, the shielding layer is not connected. |
2) The pulse and direction signal lines and the motor lines are not allowed to be bundled side by side, preferably separated by at least 10 cm. Otherwise, the motor noise easily interferes with the pulse direction signal, causing the motor to be inaccurately positioned, and the system is unstable. |
3) If one power supply is provided for multiple drives, parallel connections should be made at the power supply. It is not allowed to connect one to the other and then to another chain. |
4) It is forbidden to electrify the P2 terminal of the driver. When the charged motor stops,there is still a large current flowing through the coil. Pulling the P2 terminal will cause a huge moment to induce the electromotive force to burn the driver. |
5) It is strictly forbidden to add the tin to the terminal after adding the tin, otherwise the terminal may be overheated due to the contact resistance becoming larger. |
Output current setting value |
For the same motor, the larger the current setting value, the larger the motor output torque,but the heat of the motor and the driver is also more serious when the current is large. The magnitude of the specific heat generation is not only related to the current set value, but also to the type of exercise and the dwell time. The following setting method uses the rated current value of the stepping motor as a reference, but the optimum value in practical applications should be adjusted based on this. In principle, if the temperature is very low (<40 °C), the current setting value can be appropriately increased to increase the motor output power (torque and high-speed response). |
1) Four-wire motor: The output current is set to be equal to or slightly smaller than the rated current of the motor; |
2) Six-wire motor high torque mode: the output current is set to 50% of the rated current of the motor unipolar connection; |
3) Six-wire motor high-speed mode: the output current is set to 100% of the rated current of the motor unipolar connection; |
4) Eight-wire motor series connection method: the output current can be set to 70% of the rated current of the motor unipolar connection; |
5) Eight-wire motor and connection method: The output current can be set to 140% of the rated current of the motor unipolar connection. |
Motor selection |
The DM860 can be used to drive 4, 6 and 8 wire two-phase, four-phase hybrid stepping motors with a step angle of 1.8 degrees and 0.9 degrees. When selecting a motor, it is mainly determined by the torque and rated current of the motor. The torque is mainly determined by the size of the motor. The large- sized motor has a large torque; the current is mainly related to the inductance, and the small-inductance motor has high-speed performance, but the current is large. |
Determine the load torque, the ratio of the working speed range: |
T motor = C (Jε + T load) J: Moment of inertia of the load ε: Maximum angular acceleration of the load C: Safety factor, recommended value 1.2-1.4 T load: maximum load torque, including effective load, friction, transmission efficiency and other resistance torque |
Frequently questions and troubleshooting |
The motor does not turn: |
■Check if the power supply circuit is powered normally |
Whether the signal current is increased to 7-16mA |
■Whether the subdivision is selected |
■Is the current selected? |
Motor steering error: |
■The motor line phase sequence is wrong, you need to exchange any two wires. |
■The motor line has an open circuit, check and connect |
The alarm indicator lights up: |
■Whether the motor line is connected incorrectly |
Is there any overvoltage and undervoltage? |
■Motor or drive damage |
Inaccurate location: |
■Signal interference |
■The shield is not connected or not connected. |
■The motor line has an open circuit, check and connect |
■Subdivision error |
■The current is too small |
Stall when the motor accelerates: |
Short acceleration time |
■The motor torque is too small |
■The voltage is low or the current is too small |
FAQS:
1. How can get it started as soon as possible when you first use the drive?
After you correctly connect the power cord, the motor line, the Hall line, the external potentiometer slowly accelerates. After the motor is turned correctly, you can test the enable, direction and other functions. If you are unfamiliar with the product, the initial use should be done after the test. And then it can be installed to the actual use.
2. What will come about if power supply is reverse?
It will immediately burn the drive.
3. What is the maximum of the upper control signal voltage ?
The maximum voltage of the speed regulation signal is 5V. Exceeding this voltage will cause the drive to burn.
4. After the driver has been working for a long time, the shell is hot. Is it normal?
Yes, it is. At room temperature, after long working hours, it is up to 90 degrees. And it will not affect the performance.
5. The power indicator is light, but the motor does not turn and shift, what is the reason?
There may be a mistake in the phase line and the Hall line. Please re-energize the wiring according to the motor manual.
6. Can my motor speed transferred to 6000 with this drive?
The maximum speed of the brushless motor is determined by the parameters of the motor itself. The drive can control the motor speed from 0 to the highest speed.
7. I already have a motor and how to install this drive after wiring?
You must first determine the motor phase and the definition of the Hall line, and then you can connect it with wires. If you are not sure, you need to ask the motor manufacturers. Incorrect wiring can cause damage to the drive.
8. Can I add some features on this drive or do new product development?
Yes, please contact us.